
Mission critical software for automotive
Challenges in mission critical software for automotive
Autonomous vehicles need a set of sensors to “see” the surrounding environment (360o) regardless of external conditions (weather, traffic, pedestrians, etc.) and without human interaction. All these sensors generate a huge amount of data (around 25 Gigabytes per hour) that has to be processed within milliseconds. On the other hand, autonomous systems rely on machine learning algorithms to process sensor data to make decisions on navigation and other critical tasks.
Klepsydra solutions overview
Thus, there are two immediate challenges where Klepsydra can help with their products:
1. Klepsydra SDK collects the data generated by all sensors and processes it more efficiently with zero data loss and with a reduction
2. Klepsydra ROS 2 is based on the SDK, Klepsydra has developed its own executor for ROS 2, with a never seen before performance in an executor.
The benchmarks carried out by Klepsydra on a Raspberry Pi4 shows that the ROS plug-in can process up to 10 times more data with a 75% reduction in CPU consumption.
With the combination of these two products, autonomous vehicles will be able to carry out detection and classification of data coming from sensors more efficiently and quicker than other automative software tools.
Klepsydra solution for mission critical software for automotive
Klepsydra products have been created based on real-time and deterministic approaches. They are characterised by the following technical features:
Figure 1. Stream-processing style programming
- Zero data loss. Based on trading software techniques, Klepsydra products have no data loss, which make them safer than market leaders.
- Boosting data processing. Klepsydra can increase data processing throughput by x2-x8 times.
- Processor power consumption reduction. A reduction of 30-50% can be reached.
- Real-time operations. Klepsydra products can process data in real time with low latency. They are substantially more stable, predictable and deterministic than other edge solutions.
Benchmark performances
1. Xilinx/CAN Data Processing Benchmark
Technical Spec:
- Processor: Xilinx ZedBoard
- OS: PetaLinux
- Middleware: CAN-bus/CAN-open
Benchmark Scenario:
- Multi-sensor data processing
- Traditional multi-thread vs Klepsydra’s processing engine
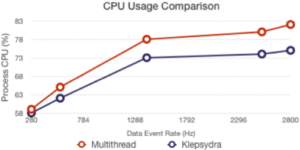
Figure 2. CPU usage
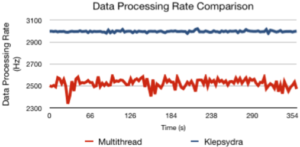
Figure 3. Data processing rate
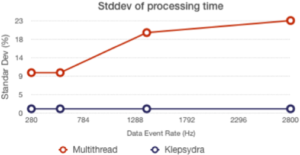
Figure 4. Processing time
2. Klepsydra’s executor vs. ROS standard executors
Technical Spec:
- Raspberry pi 4B, 4GB Ram
- OS: Ubuntu 20.04, Real time patch
- Middleware: ROS Galactic
Benchmark Scenario:
- Ros Reference system
- Node structure simulating autonomous driving system.
- Underlying task is prime factoring up to N.
- Measured latency for critical safety path.
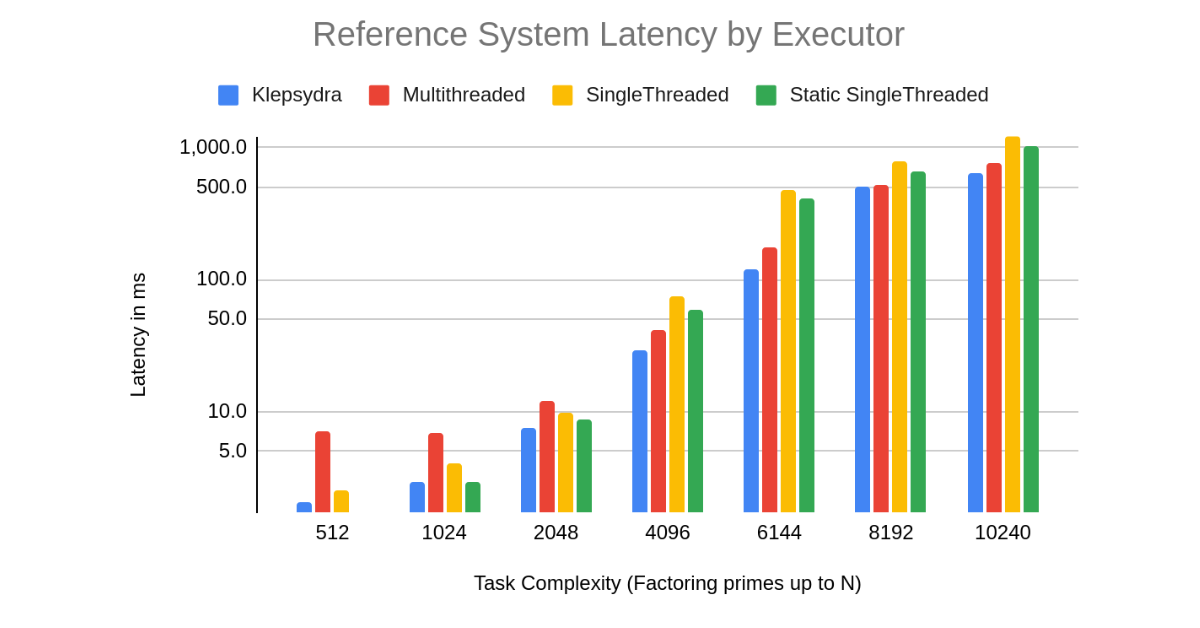
Figure 5.
Benchmark Scenario:
- Multi-sensor data processing
- Traditional multi-thread vs Klepsydra’s processing engine
Figure 2. CPU usage
Figure 3. Data processing rate
Figure 4. Processing time
Request our professional trial
We offer a 90 days trial license including email support. Phone and onsite support and training can be requested.
Please fill the form below and our team will be in contact to provide access to download our products.