Geolocation onboard Earth Observation satellite refers to the process of determining the precise location of a target on the Earth’s surface using data acquired by sensors onboard the satellite. This is typically done by comparing the position of the target in the image to the known location of reference points, such as landmarks, coastlines, or other features with known coordinates.
Geolocation onboard Earth Observation satellite is used for a wide range of applications, including mapping, monitoring natural disasters, tracking climate change, and assisting in military operations. The accuracy of geolocation can vary depending on the sensor used, the resolution of the image, and the processing algorithms employed.
Satellite-based geolocation can provide unique advantages over other methods, such as ground-based observations, because it can cover large areas and operate in remote or inaccessible regions. However, it also has its limitations, such as atmospheric distortion, sensor calibration errors, and the need for accurate reference data.
What are some methods used for geolocalisation onboard Earth Observation satellites?
- GPS: Global Positioning System (GPS) is a satellite-based navigation system that can provide precise location data to a receiver on the satellite.
- Inertial Navigation: Inertial Navigation Systems (INS) use accelerometers and gyroscopes to track the satellite’s position and orientation relative to its starting point.
- Ground Control Points: Ground Control Points (GCPs) are identifiable features on the Earth’s surface with known coordinates. Satellites can use GCPs to calibrate their sensors and determine their position.
- Cross-Correlation: Cross-correlation involves comparing a satellite image with a reference image to determine the location of features in the scene.
How can the use of AI for cross-correlation improve geolocalization onboard Earth Observation satellites, and what are some potential benefits of this approach?
The use of Artificial Intelligence (AI) for cross-correlation can provide several potential benefits for geolocalization onboard Earth Observation satellites:
- Accuracy: AI algorithms can learn to identify and match features in satellite images more accurately than traditional image matching techniques. This can improve the accuracy of geolocalization onboard Earth Observation satellites and enhance the quality of the resulting images.
- Reduced Need for Ground Control Points: Traditional methods of geolocalization using cross-correlation typically require the use of ground control points (GCPs) to align images with their true locations on Earth. However, AI algorithms can learn to recognize features in images without the need for GCPs, reducing the need for costly and time-consuming ground surveys.
What is KAMnet?
KAMnet is a state-of-the-art Deep Neural Network (DNN) that has been specifically designed for geolocalization using images as input data. The network is capable of accurately determining the geographic location of an image by having learnt the non-linear transformation from the image 2-Dimensional space, to the geolocation 3-Dimensional space, when training over a large database of reference images with known geographic coordinates.
Artificial Intelligence (AI) algorithms are increasingly used onboard to enhance Earth Observation applications, helping to autonomously improve the observations and optimize the amount of downlink data sent to Earth (e.g., not relevant, or low-quality data). This contribution proposes the use of machine learning techniques to train and deploy on-board Convolutional Neural Networks (CNNs), trained with synthetic Earth images. These CNNs provide real-time, enhanced in-orbit determination of a Sun-synchronous orbiting spacecraft as well as to tag the captured images with geo-localisation information.
The proposed solution for pose estimation in the Earth orbit scenario involves introducing different image effects such as clouds coverage, terrain seasonal variations, and illumination effects in the training and testing of regression CNNs. AutoML has been implemented in the workflow to efficiently explore the Neural Architecture Space (NAS), improving the accuracy of the pose estimation, and optimizing hyperparameters. The networks analysed in this study include efficiency-oriented state-of-the-art CNN architectures, with a focus on keeping the total size and computational cost as low as possible. Additionally, architectures implementing Time Distributed layers have been explored, taking advantage of the orbit dynamic pattern underlying in the image sets and enabling the estimation of time-derived quantities.
How to run the demo
Step 1
To access the DEMO, please use one of the following links depending on your processor type:
- Computer x86: https://space.demo.klepsydra.com/kamnet-admin/
- Computer ARM: https://spacearm.demo.klepsydra.com/kamnet-admin
Once you click on the link, please wait for the table to load and display the status of the demo (active or inactive). If the status is shown in green, the demo is running correctly. However, if the status is in red, the demo has either stopped or finished (it lasts 20 mins). If the demo is not active (RED), click on the start button and wait for 5 seconds for the demo to start.
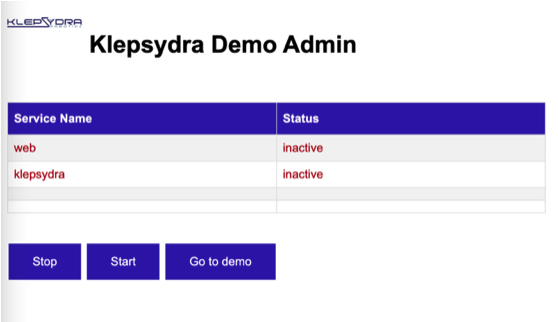
Image 1.
Step 2
If all four boxes are green, and the text “OK” is displayed, it indicates that the demo has been started successfully. Once the demo is up and running with all the necessary processes, click on the “Go to demo” button.
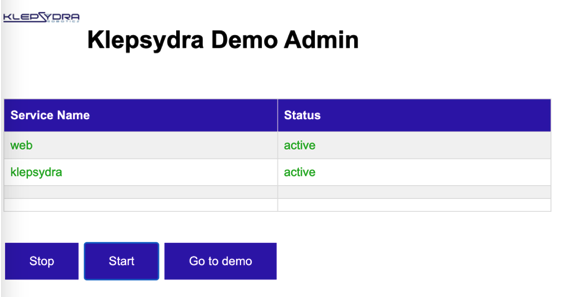
Image 2.
This button takes you to the demo below:
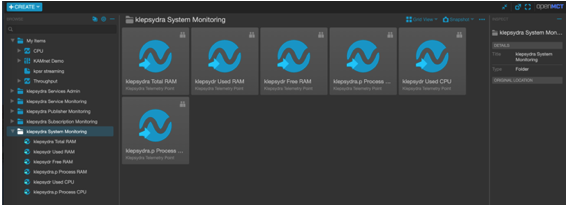
Image 4.
Step 3
Once selected, a list of boxes will appear on the right. Click on the one named “KAMnet demo”:
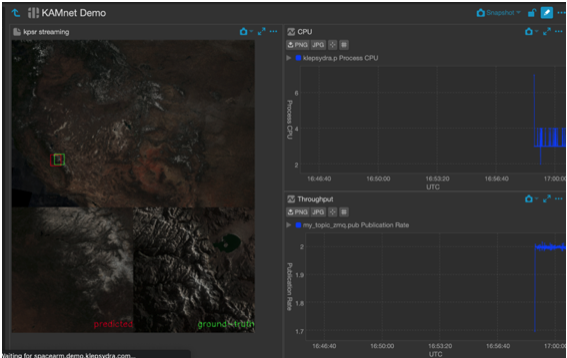
Image 5.
Benefits of Klepsydra AI
Klepsydra AI demonstrates remarkable elasticity and high-performance capabilities. The kpsr.lat configuration can process up to two times more images per second than TensorFlow Lite, while kpsr.cpu processes the same number of images as TensorFlow Lite but with fewer CPU resources. These improvements are evident in both the Intel and ARM versions of the demo.
In summary, Klepsydra AI provides customers with a unique capability to adapt to their specific needs, whether it be latency, CPU, RAM, or throughput. This feature makes Klepsydra AI highly suitable for onboard AI applications such as Earth Observation onboard data processing and compression, vision-based navigation for in-orbit servicing, and lunar landing.
Acknowledgments
We extend our sincere gratitude to Manuel Sanjurjo and Alfredo Escalante from the University Carlos III de Madrid for their invaluable support and guidance throughout our research project. The University Carlos III de Madrid has developed the KAMnet DNN, and technical details about this network will be available in an upcoming IAC paper to be published later this year. We are grateful for their contributions, as this project would not have been possible without them.